机器人终于有“触觉”了!复旦团队甩出“电子皮肤”王炸!
At the 2025 World Artificial Intelligence Conference (WAIC) held in Shanghai from July 26 to 28, a special invention appeared. It was an “adaptive vision-tactile AI sensor” made by the team from Fudan University’s Institute of Trustworthy Embodied Artificial Intelligence. This was the first time it was shown to the public.
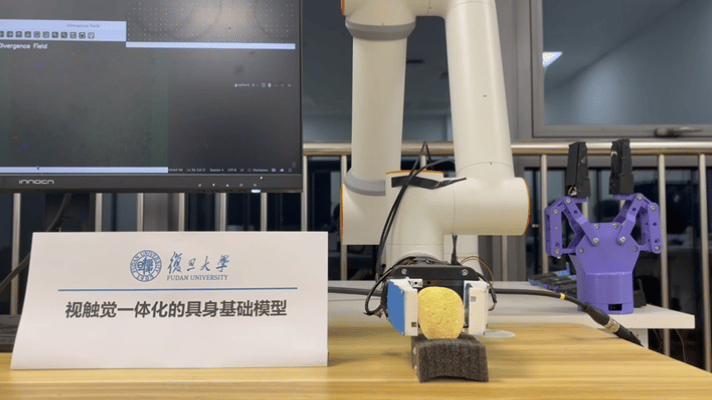
This sensor acts like a “tactile gripper (触觉夹爪)” for robots. It can pick up fragile things such as tofu, potato chips and jelly very carefully. It feels the object’s surface, softness, hardness and how slippery it is. Then it lifts and puts down the object slowly without breaking it. Even more amazing, it can take tangyuan (glutinous rice balls) out of liquid. It watches where the tangyuan moves, catches the floating one with a spoon and moves it to another bowl.
How does it work? The sensor has special features: it is flexible, sensitive and has “tactile nerves”. It can feel different kinds of forces and uses both what it sees and AI to work. When it holds something, its soft surface fits the object’s shape, just like human skin. This stops it from crushing things, which hard grippers often do. It can feel forces from different directions, making sure it handles objects safely and skillfully.
Chen Wenming, a researcher from the institute, says the team wanted more than just feeling pressure in one direction. They wanted the robot to feel like human skin, which can sense pressure, sliding, twisting and other complex movements. Old tactile sensors could only feel simple pressure, but new robots need to feel in many ways, like our skin, to work better.
To make this happen, the team put a small camera inside the sensor’s tactile layer. When force is applied, tiny particles in the layer move, and the camera takes pictures of this. With AI, these pictures are turned into information about where and how much force is applied. This sensor is very sensitive, even more than human fingertips. It is also cheap to make, much cheaper than old “electronic skin”. In the future, it could be used in many areas, like making small parts, helping in surgeries and making better artificial hands.
原创编写 版权所有 侵权必究! 每日更新 个性化阅读 英语飙升!1. 3.What opinion may Chen Wenming hold?(细节理解)
A Old sensors work well.
B Robots need skin-like feeling.
C Simple pressure is sufficient.
D Complex movements are unnecessary.
2. 4.How is the sensor according to the passage?(细节理解)
A Sensitive and low-cost.
B Slow and heavy.
C Expensive and weak.
D Large and rough.

